El proceso de trabajo de la batimetría monohaz autónoma con tecnología USV (Unmanned Surface Vehicle) del Apache 3 implica una serie de pasos específicos que se llevan a cabo de manera eficiente y precisa. A continuación, se describe el proceso general:
1 -Preparación y Planificación:
Antes de iniciar la batimetría, se realiza una planificación detallada que incluye la delimitación del área de mapeo, la definición de las rutas de navegación y la configuración de parámetros específicos para la recopilación de datos.
2.Puesta en Marcha del USV:
Se inicia el vehículo USV, en este caso, el Apache 3, y se verifica el funcionamiento adecuado de todos los sistemas y sensores y motores.
3.Navegación Autónoma:
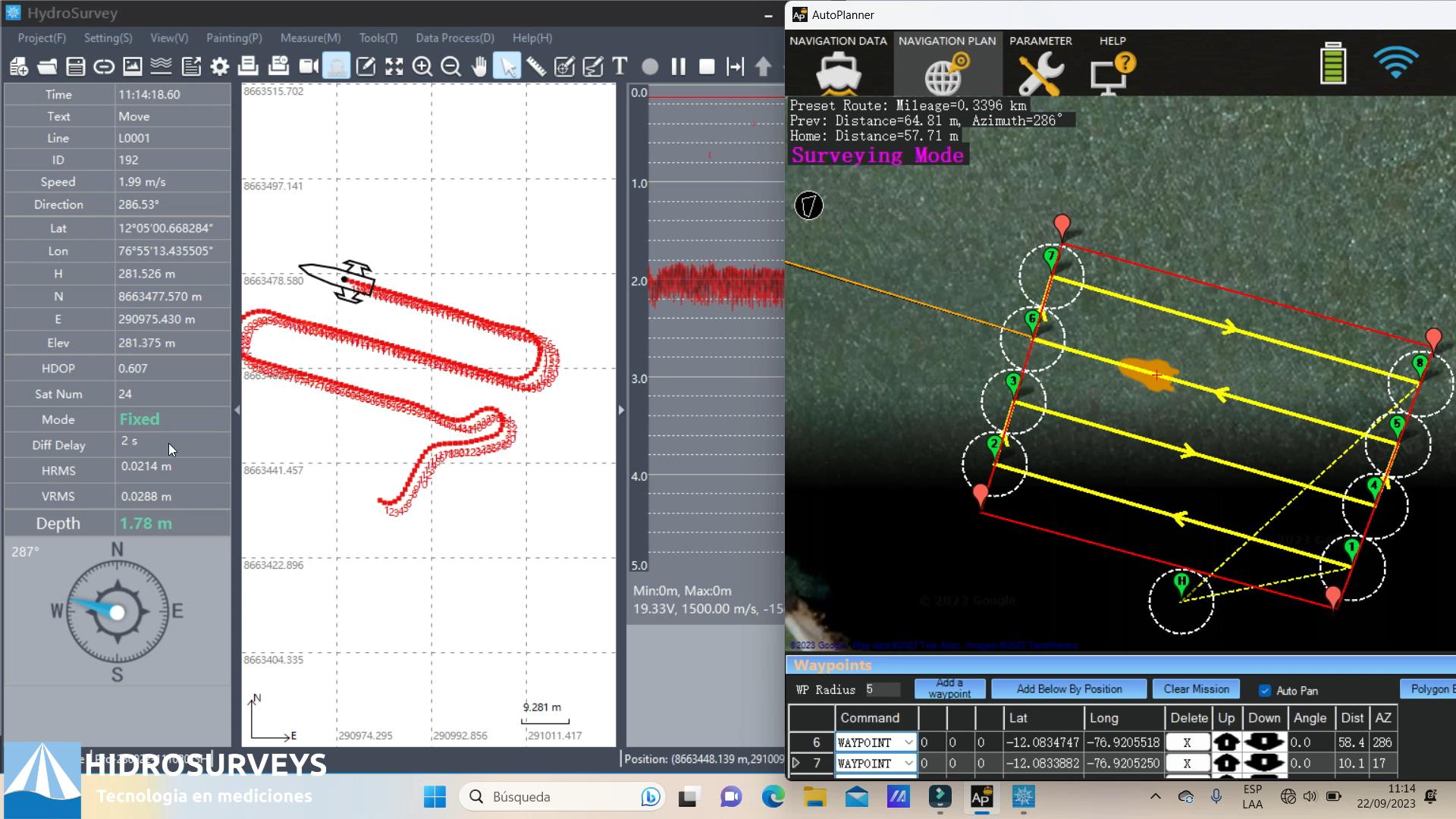
El USV se desplaza de manera autónoma a lo largo de las rutas predefinidas. La autonomía del vehículo permite cubrir grandes extensiones de agua de manera eficiente con la supervision del personal en tierra en base a la telemetria en tiempo real.
4.Recolección de Datos Bathymétricos:
El sistema monohaz a bordo del Apache 3 emite haces sonares hacia el fondo del cuerpo de agua. Estos haces sonar rebotan en el lecho marino y son detectados por el sistema, permitiendo medir la profundidad con alta precisión.
5.Registro de Datos:
Los datos batimétricos recopilados se registran y almacenan en tiempo real. Esto incluye información sobre la profundidad del agua en cada punto mapeado.
6.Monitoreo y Ajustes:
Durante el proceso, el USV monitorea continuamente su entorno y realiza ajustes en la navegación según sea necesario para garantizar una cobertura completa del área designada.
7.Finalización y Retorno:
Una vez completada la tarea de batimetría en el área designada, el USV finaliza su misión y regresa al punto de inicio o a un lugar predeterminado para su recuperación.
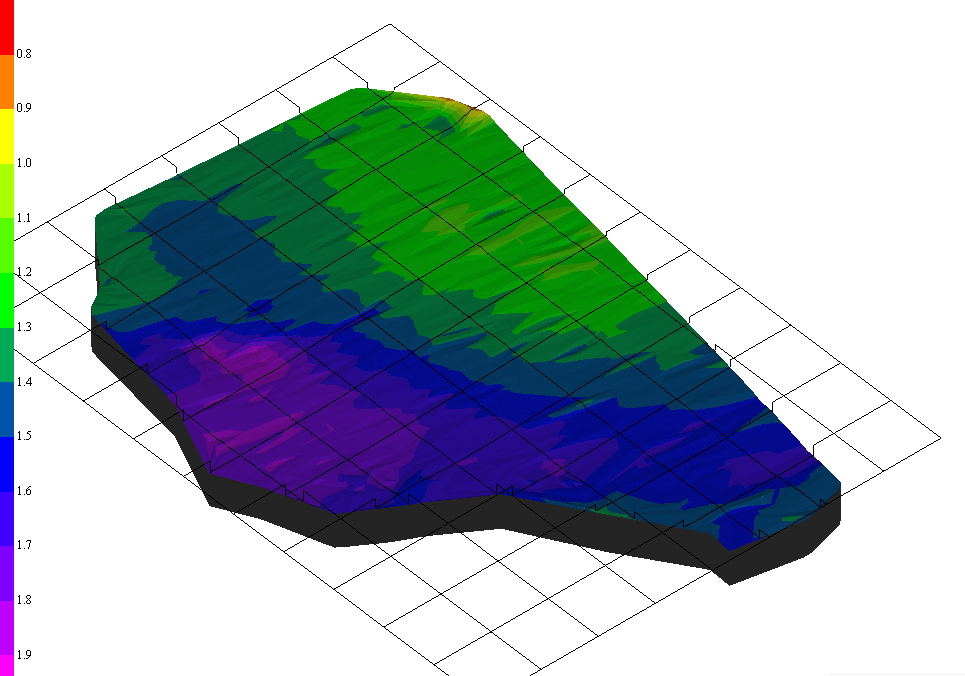
8.Transferencia de Datos y Análisis:
Los datos batimétricos recopilados se transfieren a un sistema de análisis para su procesamiento. Se generan mapas y modelos tridimensionales del lecho marino a partir de esta información.